|
Matthew Kim Hello! I'm an undergraduate student studying computer science at UC San Diego, where I am advised by Sylvia Herbert. I have also had the privilege of collaborating with Andrea Bajcsy at Carnegie Mellon University, and Somil Bansal at Stanford University. I am currently applying to PhD programs! |

|
ResearchMy interests lie in learning algorithms that enable robots to remain reliable in complex environments. My work thus far has primarily involved developing safety filters for autonomous systems. |
|
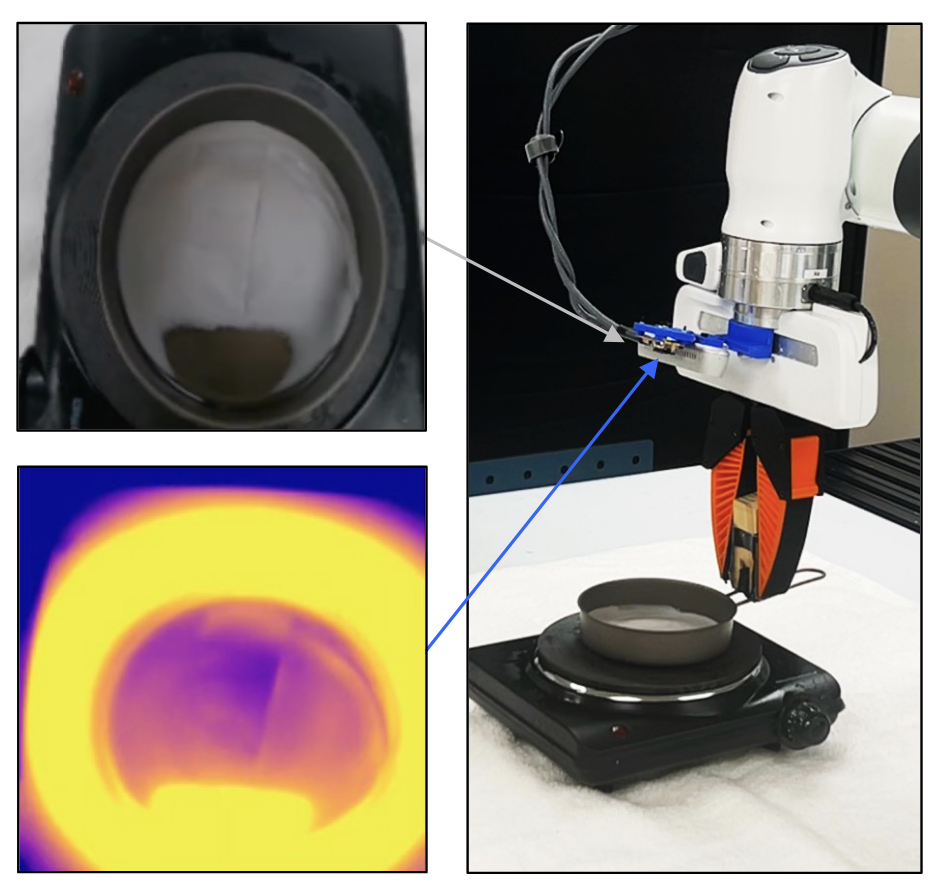
What You Don't Know Can Hurt You
Matthew Kim*, Kensuke Nakamura*, Andrea Bajcsy Submitted, Sep 2025 Investigated how partial observability manifests in world models and latent safety filters. |
|
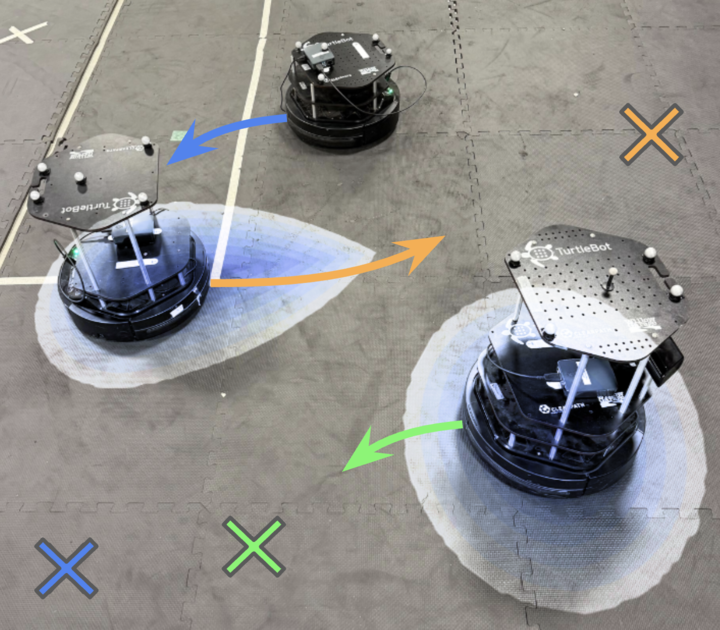
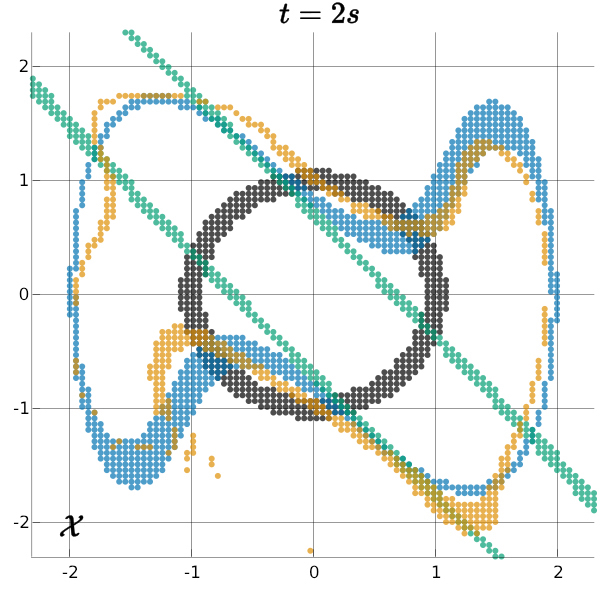
Reachability Barrier Networks
Matthew Kim, Will Sharpless, Hyun Joe Jeong, Sander Tonkens, Somil Bansal, Sylvia Herbert Submitted, Apr 2025 [paper / video / poster]Learned Hamilton-Jacobi solutions to approximate smooth and flexible CBFs for general non-linear autonomous systems. |
|
Koopman-Hopf Hamilton-Jacobi Reachability and Control
Will Sharpless, Nikhil Shinde, Matthew Kim, Yat Tin Chow, Sylvia Herbert Arxiv Preprint, Nov 2023 [paper] Leveraged Koopman linearizations and the Hopf formula to obtain a performant algorithm for high-dimensional, nonlinear autonomy. |
|
Website template by Jon Barron (source code).
|